西门子PLCCPU1217C模块控制器,CPU1217C价格型号,S7-1200代理商,西门子PLC1200参数,
信号板的概念 –
信号板可以增加额外的I / O点,而不必要改变CPU的体积;例如仅仅需要一路热电阻传感器信号的输入,通过信号板就可以完成。
CPU本体集成数字量I/O,模拟量I/O和运动控制I/O –
不需要额外的硬件扩展,减少了PLC安装空间和成本。
SIMATIC S7-1200软件创新…
Step7 Basic是针对逻辑控制,HMI和网络通信功能进行开发的通用型编辑器 – [8]
所有向导,工具条和菜单具有相似的可视化效果,易于学习与维护可节约使用者大量时间。
自动检测和上载的概念 –
在设计阶段,硬件组态简单快速,所有文档存储于CPU中,包括符号,注释,描述,易于维护。
无需其它软件工具 –
具有PID控制环节自整定功能,应用PLCopen 架构的运动控制功能,这些功能都嵌入到工程软件包括用户程序中。
SIMATIC S7-1200新特性…
安全集成 –
未经授权不能修改代码或过程量,提高操作的安全性。
西门子PLCCPU1217C模块控制器
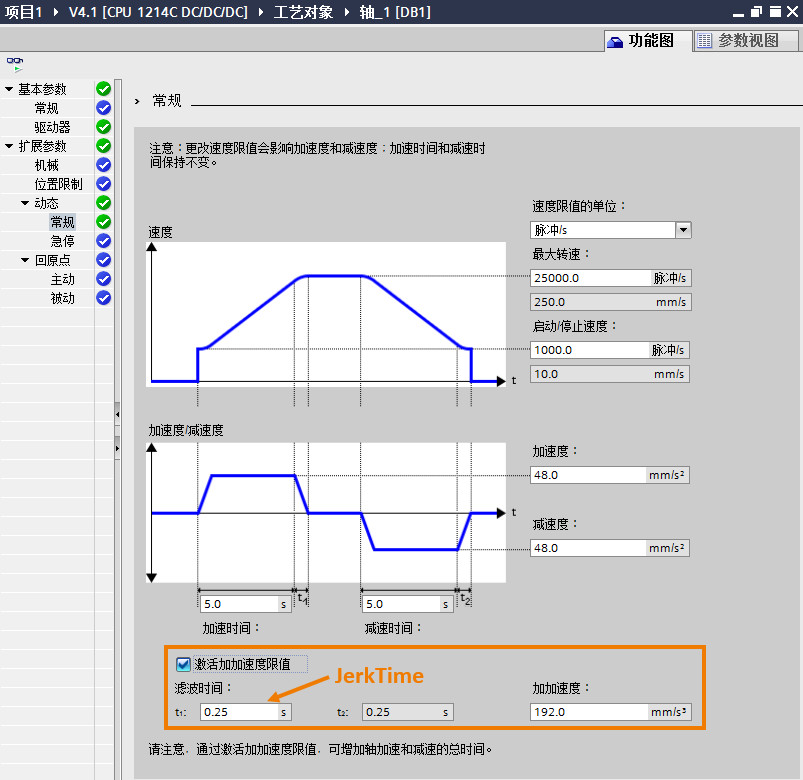
指令名称:更改动态参数指令
功能:更改轴的动态设置参数,包括:
加速时间(加速度)值
减速时间(减速度)值
急停减速时间(急停减速度)值
平滑时间(冲击)值
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。

指令输入端:
①ChangeRampUp:更改“RampUpTime”参数值的使能端。当该值为0时,表示不进行“RampUpTime”参数的修改;该值为1时,进行“RampUpTime”参数的修改。每个可修改的参数都有相应的使能设置位,这里只介绍一个。当触发MC_ChangeDynamic指令的Execute管脚时,使能修改的参数值将被修改,不使能的不会被更新。
②RampUpTime:轴参数中的“加速时间”。
③RampDownTime:轴参数中的“减速时间”。

④EmergencyRampTime:轴参数中的“急停减速时间”。

⑥JerkTime:轴参数中的“平滑时间”